AWRL6844: How a chip helps in-vehicle safety sensing
As original equipment manufacturers (OEMs) meet consumer demand for a more comfortable and feature-rich driving experience, they are faced with a growing challenge: expanding the sensing capabilities of in-car safety systems to meet evolving regulations while minimizing design complexity and cost. Upcoming changes to the European New Car Assessment Program (Euro NCAP) and other standards will change the way new cars are scored for safety, encouraging OEMs to include more sensing capabilities in their vehicles.
Traditionally, expanding in-car sensing applications to support features such as occupant monitoring, child in-car detection, and intrusion detection has required the addition of separate sensors. However, recent innovations in radar sensor SoCs now support multiple features in a single device through deep learning (edge artificial intelligence [AI]) capabilities. Local processing of in-car data with trained algorithms helps automotive system designers address complexity and minimize system cost.
This article discusses the design challenges facing OEMs and how the AWRL6844, a 60 GHz radar sensor with edge AI, can help automotive designers address these issues.
In-cabin radar design challenges
In response to recent design trends and regulatory requirements, OEMs are focusing on three main in-cabin sensing applications: occupant monitoring for seatbelt reminders, presence detection (particularly child in-cabin detection), and intrusion detection. These sensing applications are critical to keeping occupants safe throughout the driving process, as shown in Figure 1.
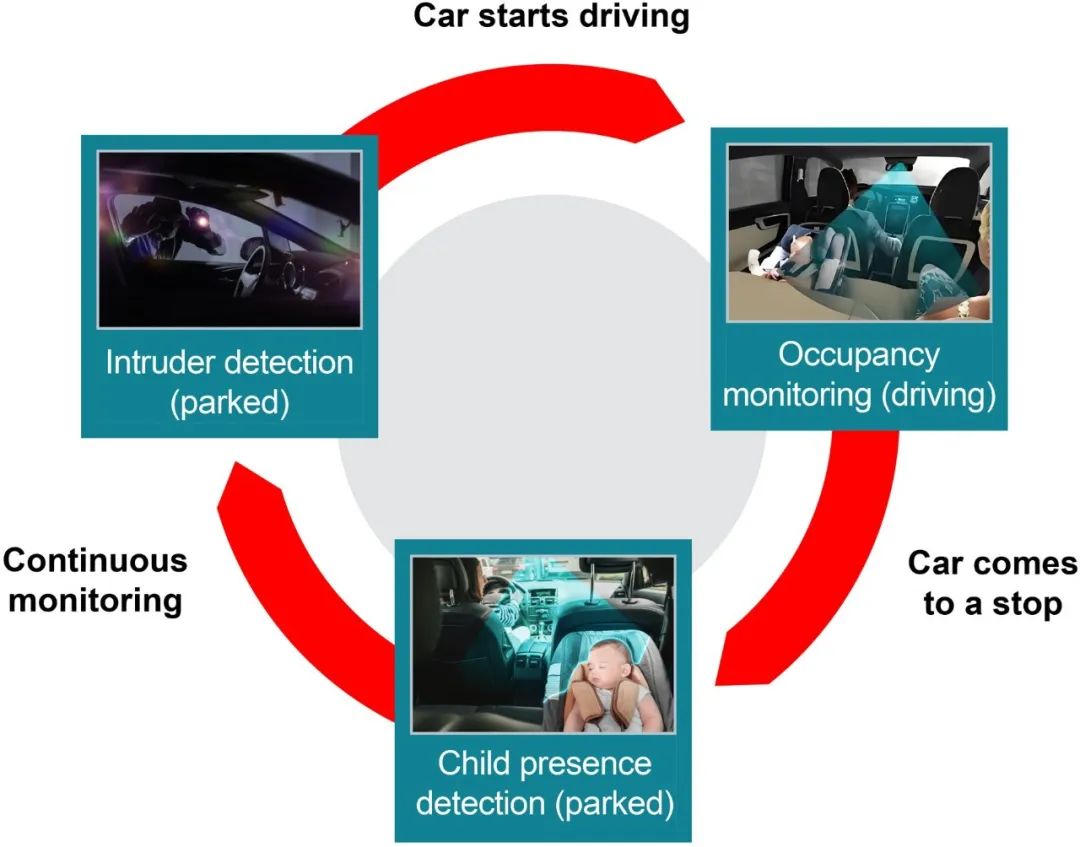
Figure 1: Enabling in-cabin sensing throughout the driving process
This section discusses each feature and highlights the design challenges OEMs face during the design process.
Occupant Monitoring for Seatbelt Reminders: Today, seatbelt reminder systems rely on in-seat weight grid sensors that are calibrated and tuned for each specific seat. In the past, these systems were installed in the front two seats of the car; however, OEMs are now beginning to place sensors in the back of the vehicle to improve safety and achieve regulatory compliance. The challenge is that placing sensors in the back can more than double the number of sensors in the vehicle and require additional wiring as well as calibration and tuning time. In addition, the weight sensor grid cannot distinguish between animate and inanimate objects (such as backpacks) and can trigger false occupancy alerts, which can affect the driving experience.
Child in Vehicle Detection: With changes to Euro NCAP in 2025, only direct detection applications will receive safety credits for child detection in parked vehicles. To meet these standards, OEMs can add additional sensors. Ultra-wideband (UWB) sensors can be reused for child in vehicle detection, but at least one more UWB sensor will be needed to achieve the necessary performance. Additionally, without high-resolution data, presence detection systems may have difficulty distinguishing between children and adults, another requirement for future NCAPs.
Intrusion Detection: Intrusion detection systems are becoming more common on high-end vehicles. Systems certified by Thatcham Research that include intrusion event detection capabilities typically use ultrasonic sensors to detect whether the vehicle has an intruder. Non-intrusive motions, such as someone walking by the vehicle or the vehicle shaking due to nearby activity, typically trigger these simple systems.
Using Edge AI to Help Solve In-Vehicle Sensing Challenges
With these in-vehicle sensing applications having increasingly stringent performance requirements, OEMs are looking for new technologies to reduce costs and simplify designs.
The AWRL6844 60GHz mmWave radar sensor is designed to help address these design challenges with a single device while also reducing system cost by $20. Figure 2 compares a typical sensor placement in a vehicle to a single sensor design approach using the AWRL6844.
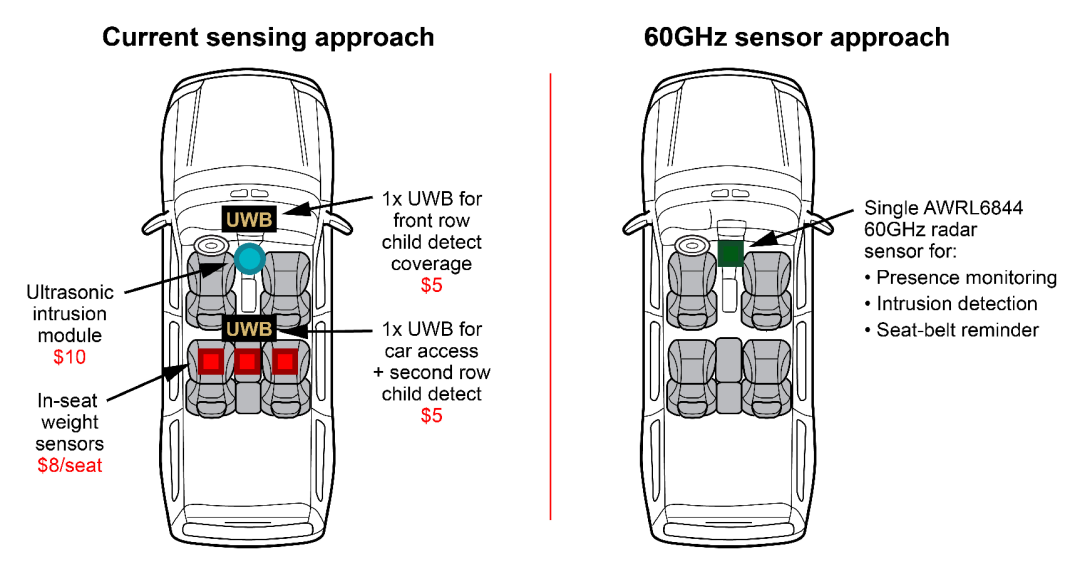
Figure 2: Comparison of current in-vehicle sensing design approaches and a simplified approach using a single AWRL6844
The AWRL6844’s 16 virtual channels provide increased spatial resolution to detect and locate occupants in a vehicle as it moves. AI processing of the high-resolution data helps the radar distinguish between animate and inanimate objects. These algorithms compile data in a short time window for faster, reliable detection and location of occupants while reducing false detections. Smart clustering algorithms running on an integrated digital signal processor can also determine with high accuracy whether a person is inside the vehicle by filtering out noise from vehicle motion. Figure 3 shows how the AWRL6844 can distinguish between a passenger in the second row of seats and a pile of water bottles.
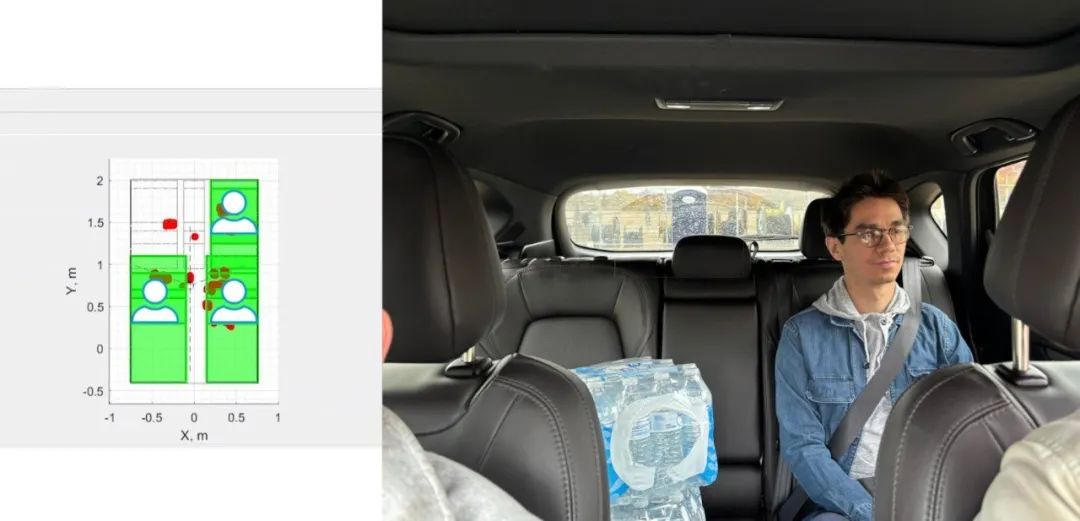
Figure 3: Occupancy localization and inanimate object recognition demonstration using AWRL6844
The AWRL6844’s wide field of view also improves the ability to detect children in footwells and rear-facing car seats, which are typically blind spots for existing detection systems. The child in-vehicle detection software uses a hybrid processing approach where traditional radar processing techniques first extract important information while a local machine learning model uses real-time data to build a classification system that distinguishes between adults and children (an example is shown in Figure 4). This hybrid approach enables faster tuning and modification of models to incorporate new test cases or requirements, reducing OEM deployment time. TI’s physically-informed neural network helps the system make more informed decisions with classification accuracy exceeding 90%.

Figure 4: Child presence detection and classification demonstration of an infant in a rear-facing car seat using AWRL6844
For intrusion detection, the AWRL6844’s integrated low-power modes and machine learning value chain help enhance detection capabilities without draining the battery when the vehicle is off. The AWRL6844 can detect and calculate 10 intrusion detection events per second while consuming less than 50mW. This prevents battery drain, which is important as battery-powered electric vehicles become more common. In addition to low power consumption, the AWRL6844 minimizes detection time while maintaining high accuracy by running intrusion detection processing on an on-chip accelerator, minimizing interference from other cores on the device. Figure 5 shows the AWRL6844’s ability to filter out noise in the environment to minimize false alarms triggered by vehicle shaking or motion outside the vehicle.
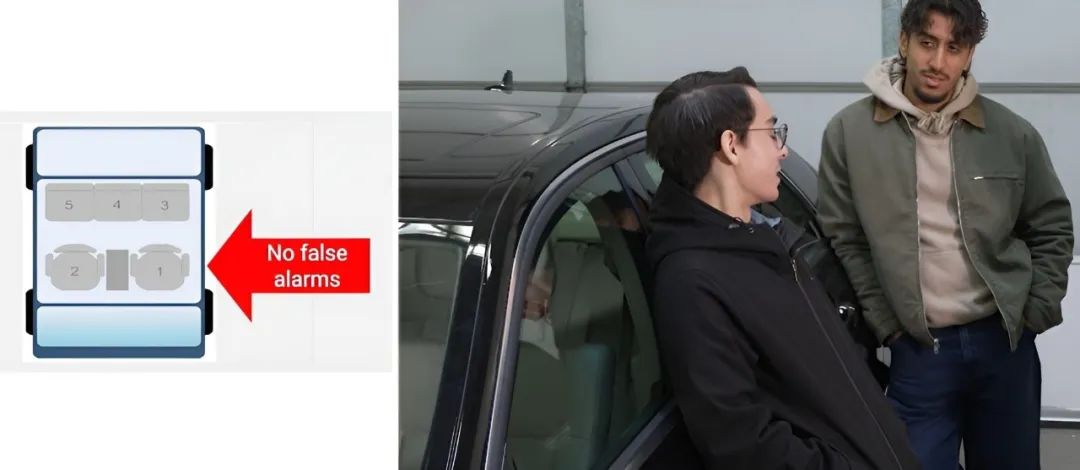
Figure 5: Demonstration of how the AWRL6844 uses edge AI capabilities to filter out noise to minimize false alarms
Conclusion
For OEMs, cost is always a challenge when meeting stringent safety requirements. With the AWRL6844, OEMs can scale from low-power applications to high-performance applications without having to worry about the complexity of integrating three separate technologies for a single use case. Superior detection, localization, and classification capabilities, coupled with improved false detection performance, ultimately result in a more convenient and seamless experience for consumers.