Servo drive solution for real-time multi-axis position control over Ethernet based on STMicroelectronics STEVAL-ETH001V1
The STEVAL-ETH001V1 servo drive is developed to solve three-phase PMSM applications for multi-axis position control and connectivity. It can be used in a variety of factory automation applications, such as industrial connectivity, drive and motion control.It includes motor control power stage, digital drive section and power management section.
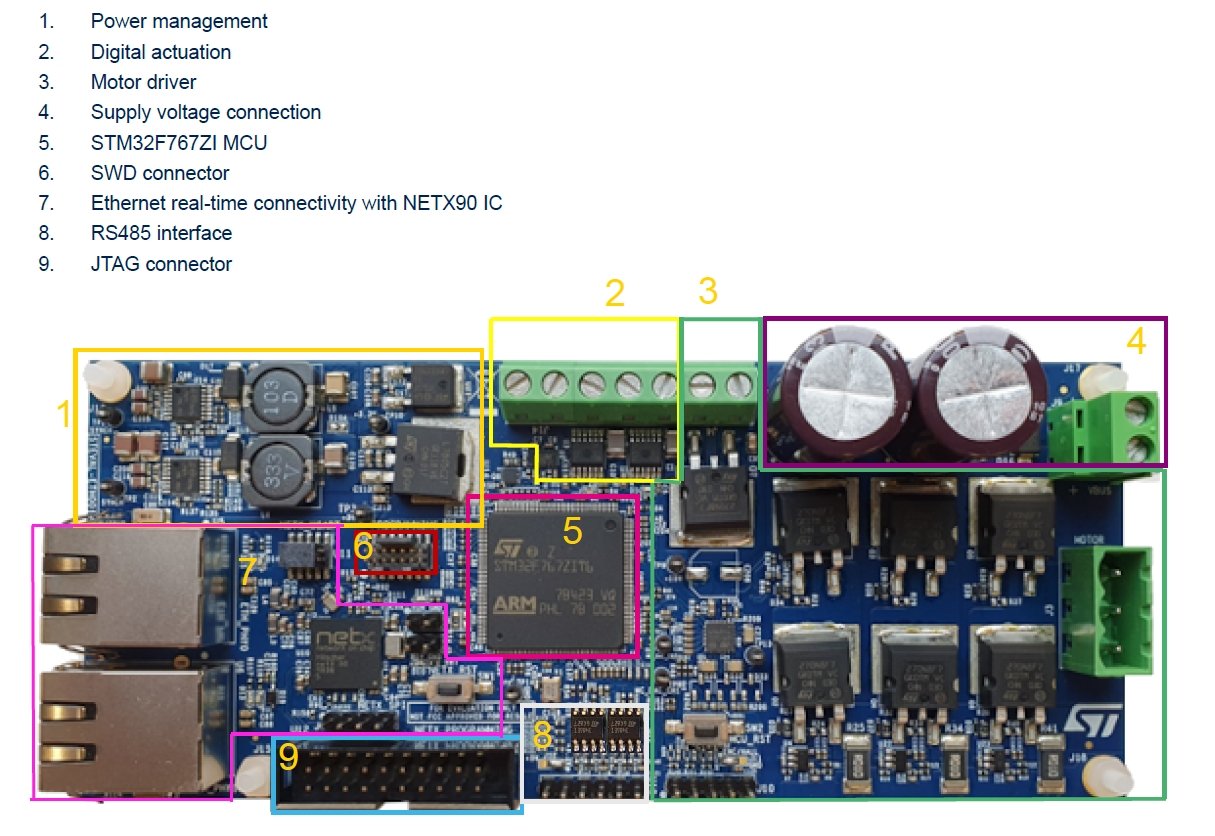
The motor control power stage consists of STDRIVE101 half-bridge gate driver and six STH270N8F7-2 power MOSFETs, with real-time connection function to Ethercat communication protocol supported by NETX90 network controller,
while the digital drive section has industrial IO management of CLT03-2Q3 (input) and IPS160H (output).
The power management section is powered by L7987, L7805CD2T-TR and LD39150DT33-R devices. These converters are designed to provide 3.8 V and 15 V reference voltages when the input voltage operates in the range of 20-48 V.
The STEVAL-ETH001V1 is equipped with two RJ45 connectors for daisy chain connection and an RS485 interface for connection of a digital encoder or a host powered by the ST3485EI.
For better noise immunity, the PCB uses a 6-layer stack-up and insulated traces for power and ground lines. A quadrature encoder interface with indexing is also provided.
The PMSM motor is driven through remote control by the 32-bit data processing of the STM32F767ZI and real-time communication using the NETX90 network controller (connected to the MCU via four-wire SPI communication).
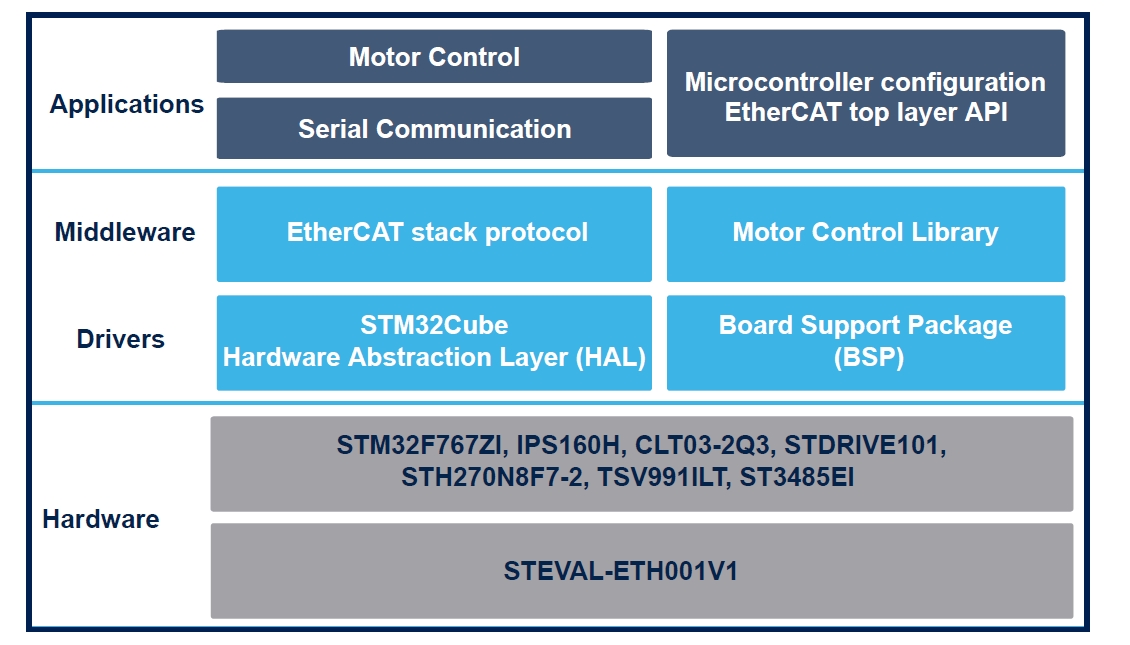
The MCU program is based on the STM32Cube architecture support, including:
• Application layer
• Driver layer with BSP/CMSIS and HAL libraries
• Middleware layer
The STSW-ETHDRV001V1 firmware package of the STEVAL-ETH01V1 servo drive solution implements the position control algorithm and runs real-time communication on the STM32F767ZI microcontroller. It can manage the connection, servo drive drive and digital input/output interface at the same time.
The connection includes real-time communication with the EtherCAT protocol stack (V. 5.0.8) of the slave node, and RS485 communication for connecting the hardware to a PC or digital encoder supporting BiSS, EnDat and SSi protocols.
The servo drive driver uses the X-CUBE-MCSDK motor control library to implement the position control algorithm and control the PMSM motor rotor position through the EtherCAT communication remote control.
The digital execution interface management is supported by a set of routines capable of managing the IPS485H digital output states based on information received from the CLT160-03Q2 digital inputs and commands received from the PC via the RS3 connection.
▶Application scenario diagram

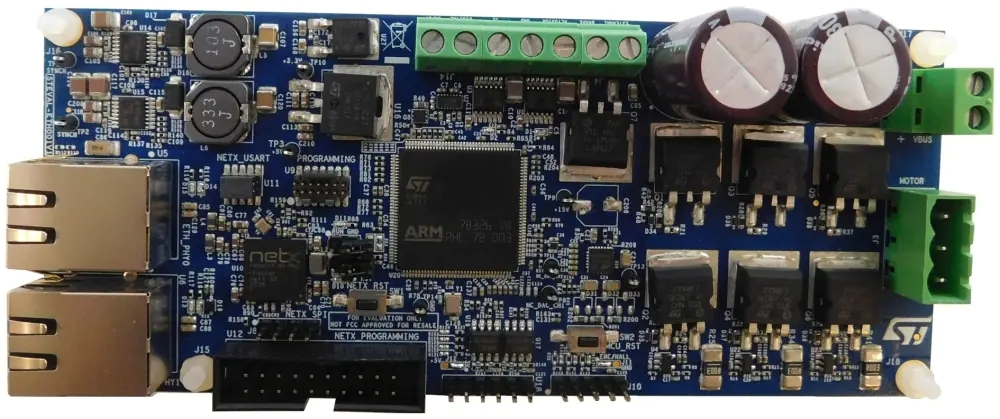
▶Development board photo
▶Solution diagram
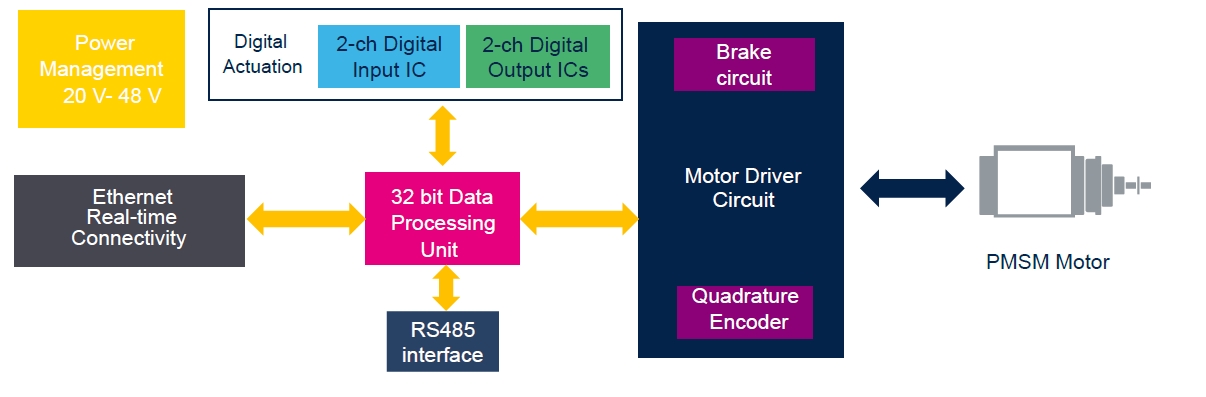
▶Board function diagram
▶Solution architecture diagram
Core technology
PCB design has strong noise immunity
Motor control 48 V design, dense integrated circuit
700W high power output
Ensure compatibility with Master Ethercat (use Bechkoff's Twincat software tool instead of hardware solution)
Supported EtherCAT slave protocol (V.5.0.8)
Program compatible with STM32Cube framework
Solution specifications
Real-time communication via Ethercat protocol
Three-phase motor drive inverter based on STDRIVE101 gate driver and STH270N8F7-2 power MOSFET
STM32F767ZI microcontroller Arm® 32-bit Cortex®-M7
NETX90 network controller
Main power supply voltage up to 48V maximum. Overvoltage regulation to 60 V
Maximum power consumption 700 W
Motor brake energy dissipation circuit
Digital drive section for industrial loads
RS485 interface for digital encoder and host interface
Onboard DC-DC converter and linear regulator